论文 #
ToolRL: Reward is All Tool Learning Needs
为了确定最佳奖励策略,探索了四个关键维度的各种奖励配置:(1) 奖励类型(奖励哪些方面),(2) 奖励尺度(奖励多少),(3) 奖励粒度(奖励信号的详细程度),以及 (4) 奖励动态(奖励如何随时间演变)。通过大量的实验确定了最符合主体工具使用情况的奖励设计,并揭示了奖励对于调用工具的 LLM 而言“有用”的原因。论文得出的核心见解总结如下:
- 推理轨迹越长并不一定越好,而且过长的奖励可能会降低性能。
- 动态奖励尺度有助于模型从简单行为平稳过渡到复杂行为。
- 细粒度的奖励分解可实现更稳定、更有效的学习。
论文得出的核心见解总结如下:
- 推理轨迹越长并不一定越好,而且过长的奖励可能会降低性能。
- 动态奖励尺度有助于模型从简单行为平稳过渡到复杂行为。
- 细粒度的奖励分解可实现更稳定、更有效的学习。
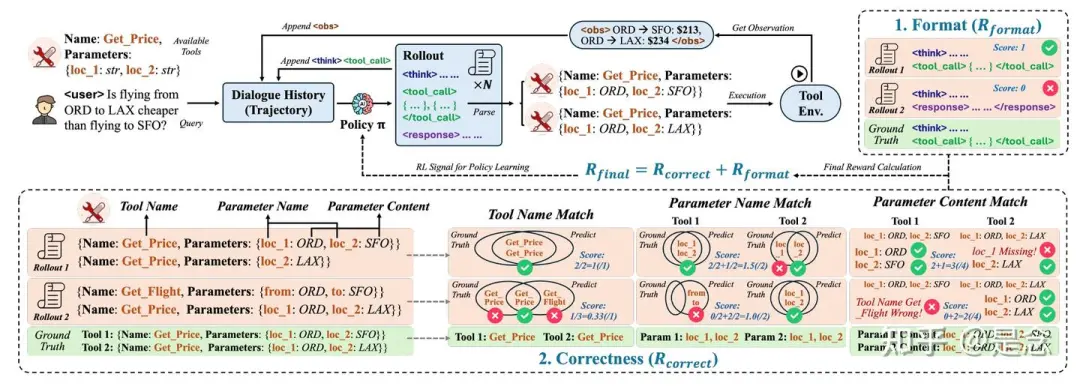
Format Reward
Correctness Reward
参考 #
2025年大模型agent rl训练多轮planning技术TORL,ToolRL, RAGEN,OTC,SkyRL-v0, GiGPO,Tool-N1 ,ARTIST, ZeroTIR, GRPO